

How it works
Stereo Vision
![]()
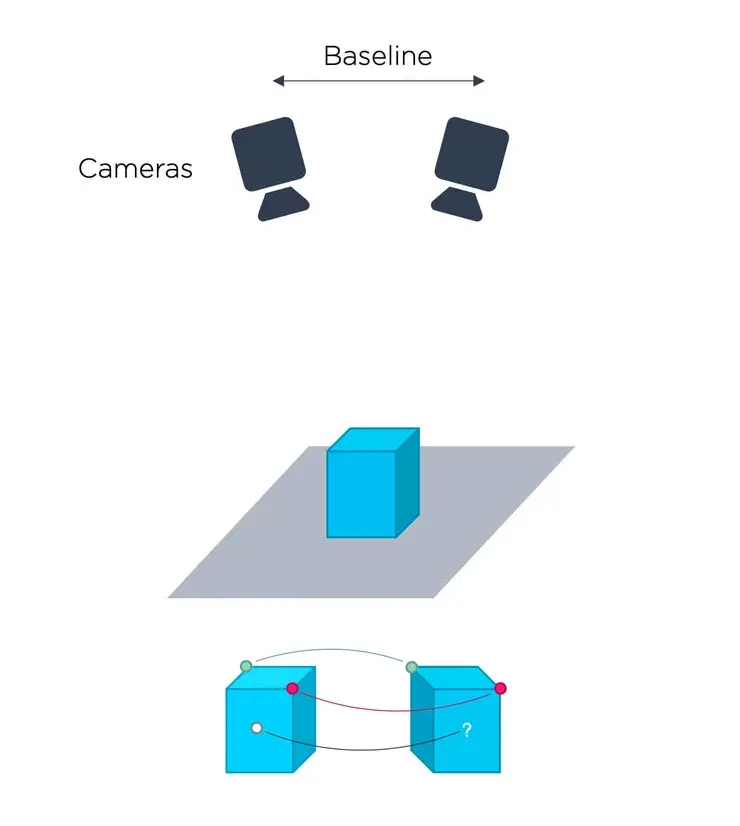
Stereo Vision
Principles
- Mimicking human vision.
- Two or more cameras.
- Triangulation. Find corresponding points in each camera.
- Disparity is proportional to depth.
Key considerations
- Passive, no active lighting required.
- Long range and outdoor usage.
- Sensitive to flat texture-less scenes.
- Less suitable for dense point cloud representations.
- Region based correspondence, block averaging.
- Look out for correspondence problem.
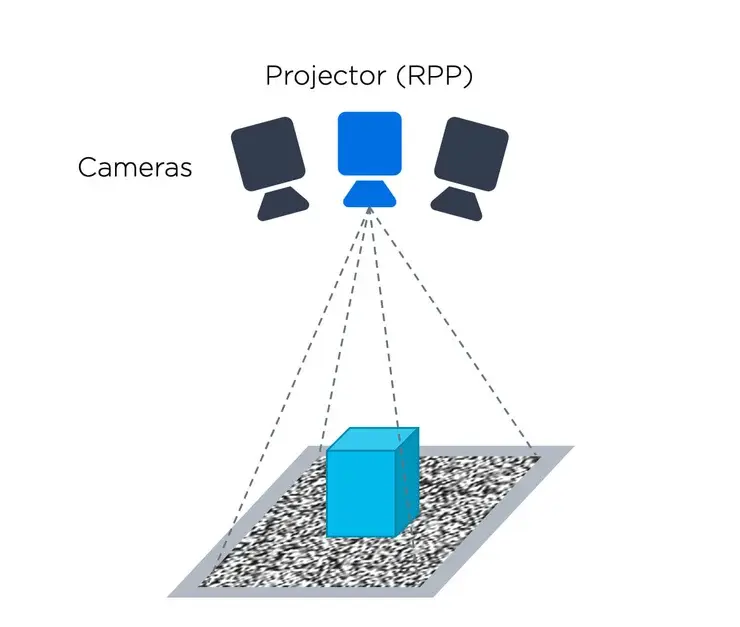
Active Stereo Vision
Principles
- Same as stereo vision.
- Additional random pattern projector (RPP).
- Mimicking human vision.
Key considerations
- Same as stereo vision, but active source.
- Shorter range
- Sensitive to ambient / sunlight.
- No texture on surfaces required.
- Solves correspondence problem.
Compare stereo and structured light vision point clouds.
Stereo- and active stereo cameras are often used by AI algorithms in bin-picking applications. Here are examples of a stereo camera point cloud and the same scene captured with a time-coded structured-light camera (like Zivid).
![]() Interactive content by Flourish
Interactive content by Flourish
Keep learning!
Read the whole article about active and passive 3D vision principles here, including stereo, active stereo, laser, ToF, and structured light machine vision.

